Import waypoints¶
Do Topo GPS je možné importovat body v následujících formátech souborů: gpx, kml/kmz, csv, geojson, jpeg, heic a heif. Více souborů těchto typů lze také importovat najednou, pokud jsou komprimovány jako soubor zip. Pokud jsou soubory uspořádány do složek v souboru zip, tato struktura složek bude také importována a viditelná na obrazovce waypoints.
Samostatné fotografie budou importovány pouze v případě, že obsahují umístění uvnitř metadat EXIF. Pro každou fotografii bude na jejím místě vytvořen bod trasy a fotografie je přidána do bodu trasy. Pokud chcete importovat více fotografií najednou, nejprve vytvořte soubor zip, přidejte fotografie a poté importujte tento soubor zip.
Do importu waypoints můžete zkusit klepnout na ikona souboru. Nejčastěji se zobrazí nástroj pro výběr aplikace. Poté musíte vybrat ‚Otevřít pomocí Topo GPS‘ nebo ‚Kopírovat do Topo GPS‘ a soubor bude importován do Topo GPS.
Někdy je užitečné použít drag and drop. K tomu musíte dlouho stisknout soubor nebo položka a přetáhnout prstem. Poté jej musíte přesunout na hlavní obrazovku mapy Topo GPS. Na iPhonu musíte po dlouhém stisknutí souboru nebo položky otevřít přepínač aplikací druhým prstem přejetím obrazovky nahoru dole. Nyní stále držíte první prst, můžete pomocí druhého prstu přepnout na Topo GPS, a pokud jste na hlavní obrazovce mapy, můžete soubor přesunout sem. Poté bude automaticky importován.
Případně můžete importovat soubory přímo do Topo GPS klepnutím na Nabídka > Více > Importovat soubor uvnitř hlavní obrazovky, jak je znázorněno níže. Poté se otevře aplikace souborů. Zde si můžete vybrat cloudové úložiště, jako je iCloud, Dropbox, OneDrive nebo Disk Google. Poté můžete procházet soubory a vybrat soubory, které chcete importovat.
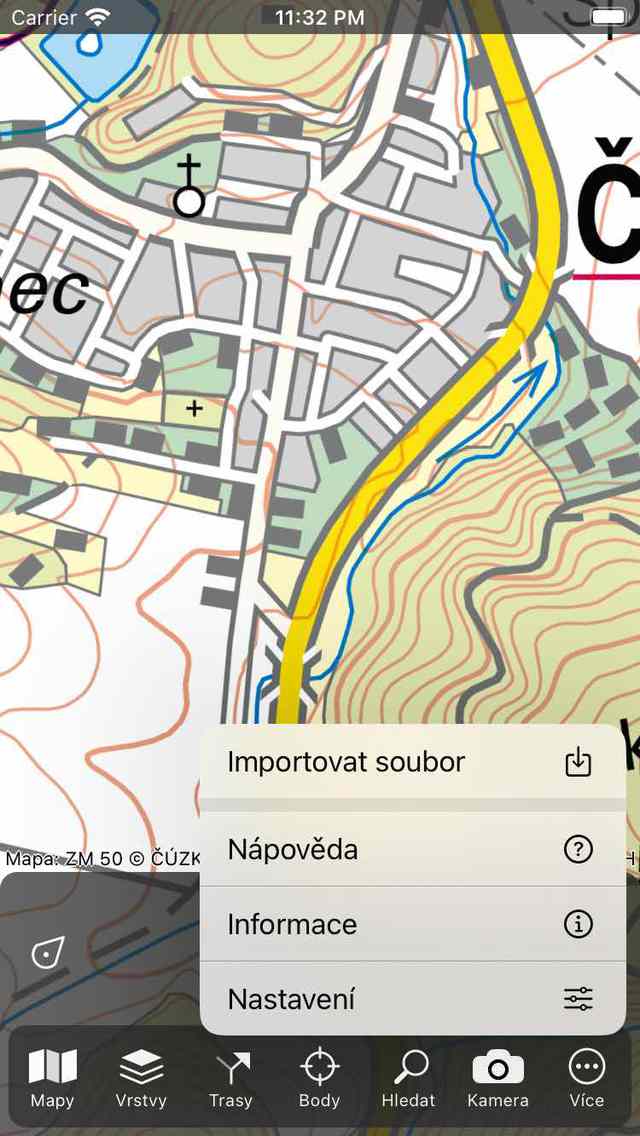
Klepnutím na Nabídka > Více > Importovat soubor importujte soubor.¶
Pokud byly waypoints úspěšně importovány, vrátíte se na hlavní obrazovku mapy a mapa bude přiblížena k importovaným waypointům. Na obrazovce waypoints (Nabídka > Waypoints) najdete všechny importované waypoints uvnitř nově vytvořené složky.